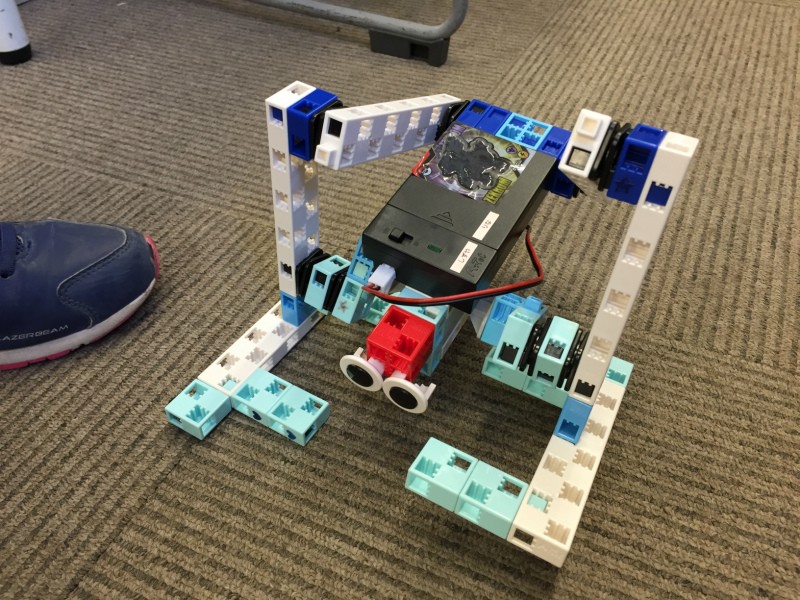
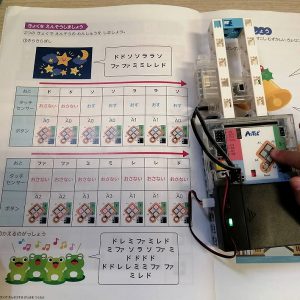
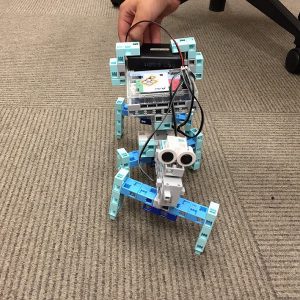
生き物が歩く時の足の動きを学びながら二足歩行ロボット作りました
ロボットプログラミングでも二足歩行や多足歩行ロボットを作りますが、今回は低学年向けの自考力キッズのカリキュラムとして歩行の仕組みを考えながらロボットを作りました。
足を持ち上げる→持ち上げた足を前に出す→足をおろす この繰り返しの動きを左右の足で交互に行うことにより前に歩くことが出来ます。
左右の足の高さがしっかりずれているかがポイントです。揃っていると左右の足は同じ動きしかしませんので、前に踏み出すことはできません。
応用編としてロボットの足の形を変えてもっと早く前に歩くロボットをつくるにはどうしたらいいかを考えてみました。
足を大きく前に出すと一歩で進む距離が長くなりますね!
モーターが回転している部分に繋がっているブロックの数を増やし長くしてみました。そうすると円周が大きくなりその分、一歩の幅が大きくなりましたね(*^-^*)





 アクセス
アクセス ページトップ
ページトップ
コメントを残す