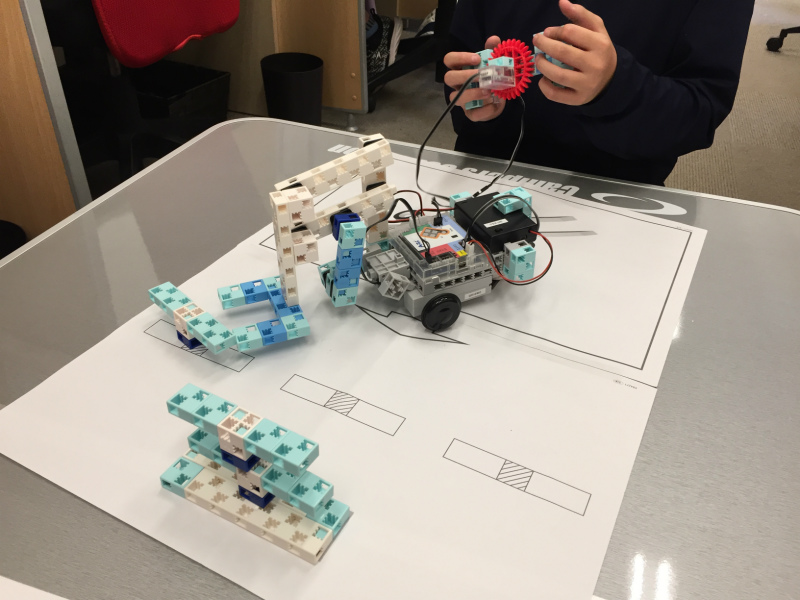
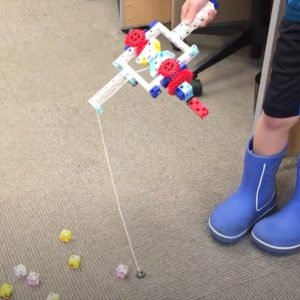
リンク機構を使ったフォークリフトを赤外線センサーを使ったコントローラーで動かします
まずは『リンク機構』について学び、荷物を運ぶフォークリフトを作ります。
リンク機構は”機械要素”の一つで、その他にはギア・カム機構・スプロケット・プーリー・ベアリングなどさまざまな要素があります。
リンク機構は棒状のパーツを回転ジョイントで組み合わせ、単純なな動きから複雑な動きを作ることができます。
さらにリンク機構は、てこ/クランク機構・両クランク機構・両てこ機構の3つに分けることができます。フォークリフトに用いたリンク機構はこの中のクランク機構の向かい合う節の長さをそろえた平行クランク機構という仕組みを使いました。動く時の形が必ず平行四辺形になるという特徴があります。
さらにこれまでに学習した加速度センサーを利用したコントローラーを搭載して、自由自在にフィールドを走るフォークリフトを作りました!
コントローラーにタッチセンサーを取り付け、フォークリフトの上げ下げを操作しています。
出来がったところで3つのパレット(荷物)を台の上に乗せて重ねるタイムアタックに調整してみました!これがかなりの難易度で難しい!


 アクセス
アクセス ページトップ
ページトップ
コメントを残す